Un grupo de investigadores han creado un entorno virtual de fuente abierta para enseñar a los coches a adaptarse a diversas condiciones climáticas o de iluminación sin necesidad de un conductor.
Los coches están aprendiendo a conducir. La Universidad de Barcelona, junto con Intel Labs y Toyota Research Institute, ha desarrollado un entorno virtual de fuente abierta. Es decir, una ‘autoescuela’ que permite a los vehículos de conducción autónoma aprender a cómo adaptarse y reaccionar ante diversas condiciones climáticas o de iluminación sin necesidad de un conductor.
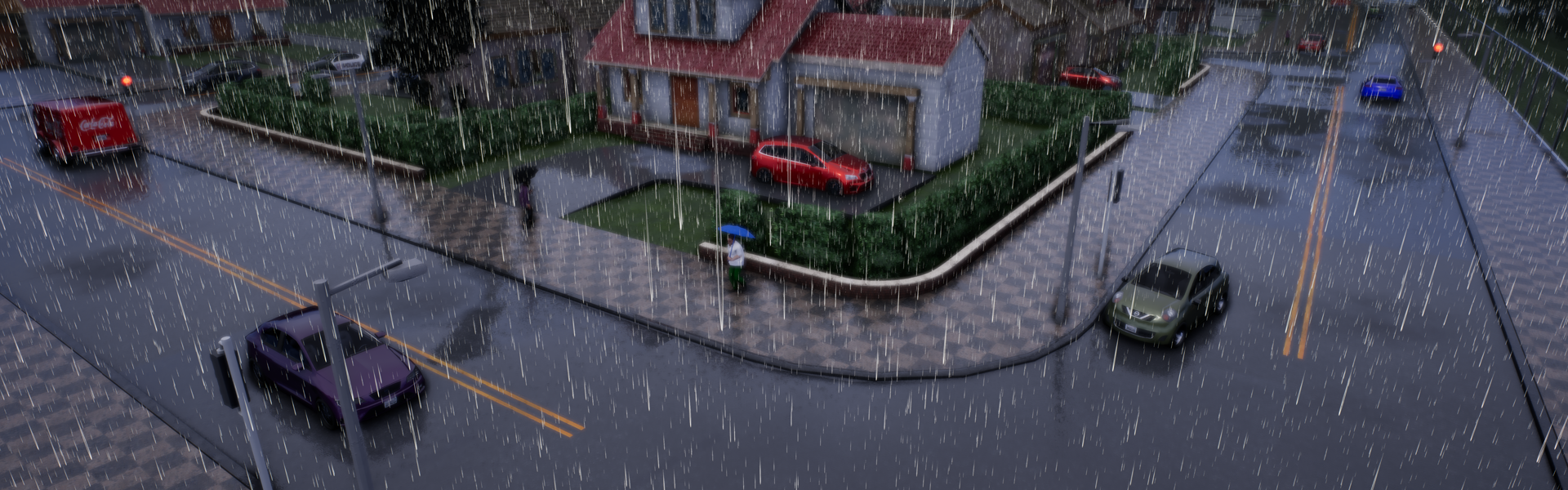
El sistema, llamado ‘Car Learning to Act’ o Coche que Aprende a Actuar (Carla), simula una amplia gama de condiciones de conducción y repite situaciones de peligro de manera interminable para ayudar al aprendizaje. El equipo de investigadores ya lo utilizó para evaluar el rendimiento de varios enfoques diferentes de conducción autónoma. No obstante, esperan que los resultados alcanzados permitan una mayor independencia de los vehículos, que hasta el momento han logrado ser efectivos en escenarios controlados.
Para buscar el mayor realismo posible, Alexey Dosovitskiy, de Intel Labs, ha incorporado en Carla una biblioteca de activos que pueden aplicarse en ciudades bajo diferentes condiciones climáticas y de iluminación. La biblioteca incluye 40 edificios diferentes, 16 modelos de vehículos animados y 50 peatones animados. ¿El resultado? Una experiencia más real de conducción que, al mismo tiempo, ofrece un control significativo sobre las condiciones de conducción, permite incluir tráfico cruzado e iteración de los peatones.
El equipo ha utilizado el simulador para crear dos ciudades con varios kilómetros de carreteras transitables y luego ha probado tres enfoques diferentes para el entrenamiento de sistemas de conducción autónoma. «Los enfoques son evaluados en escenarios controlados de creciente dificultad «, explica el equipo.
A pesar de los avances alcanzados en los últimos meses, admiten que aún existen muchos riesgos de trasladar las pruebas a las calles reales. “Los vehículos a veces conducen por la acera o por el lado opuesto de la carretera y golpean a otros vehículos, entre otras acciones potencialmente peligrosas”, precisan. Sin embargo, son conscientes de que el comportamiento de conducción resultante muestra claramente la eficacia de los sistemas.
Con el futuro como meta, el grupo de investigadores afirma que “esperamos que Carla permita a una amplia comunidad participar activamente en la investigación de la conducción autónoma”.